慶應義塾大学ロボット技術研究会がSeeed Fusion PCBAサービスを受けて「NHK#ロボコン2022」に出場しました!
慶應義塾大学ロボット技術研究会がNHKロボコン2022に向けて素晴らしいプロジェクトを準備していました。NHK大学ロボコンはロボットコンテストとして、1991年から日本全国大学の注目をあびてきます。この度、Seeed Fusionは基板製造でご支援致しました。

慶應義塾大学ロボット技術研究会について
- サークルの紹介
慶應義塾大学ロボット技術研究会は1996年に設立された学生団体です。各種ロボットコンテストの出場や個人的な電子工作プログラミング等をメインに活動しています。1年を通し、F3RCコンテスト(新人戦)から始まり、さまざまなコンテストにそれぞれがチームを組み多岐に渡って参加しています。学年の垣根を超えて互いに教え学びあい、和気あいあいとした雰囲気で製作を進めています。 - チームの紹介
チームIliasはNHK学生ロボコン2022〜ABUアジア・太平洋ロボコン代表選考会〜に向けて昨年10月より活動していました。慶應義塾大学ロボット技術研究会からNHKロボコンの本戦に出場するのは3年振り2回目で、経験やメンバーが少ないながらも互いに協力してロボットを完成させました。
NHKロボコン2022について
- 競技の紹介

競技はR1、R2の2台が行います。右がR1の「智徳」、左がR2の「気品」です。今回の目標はフィールドに設置された「ラゴリ」と呼ばれるディスクを倒し、相手の攻撃を避けながら積み上げることです。詳しいルールについては以下の動画をご覧ください。
また、大会本番の様子は以下の動画でご覧いただけます。これは豊橋技術科学大学との試合の様子です。
- ロボットの紹介
今回はテーマを回路に絞って紹介しようと思います。今回の構成を簡略化すると以下のようになります。
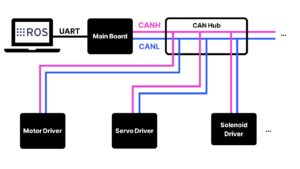
ROSからUARTでメインの基板にデータを送信し、メインのマイコンがそれを解釈してCAN Busに流します。CANのデータはUSB Type Cのケーブルを通っており、CAN Hubを介して各アクチュエータのドライバ基板に接続されます。また、CAN Hubはデイジーチェーンにすることができ、理論上どれだけデバイスがあっても制御できるような設計になっています。

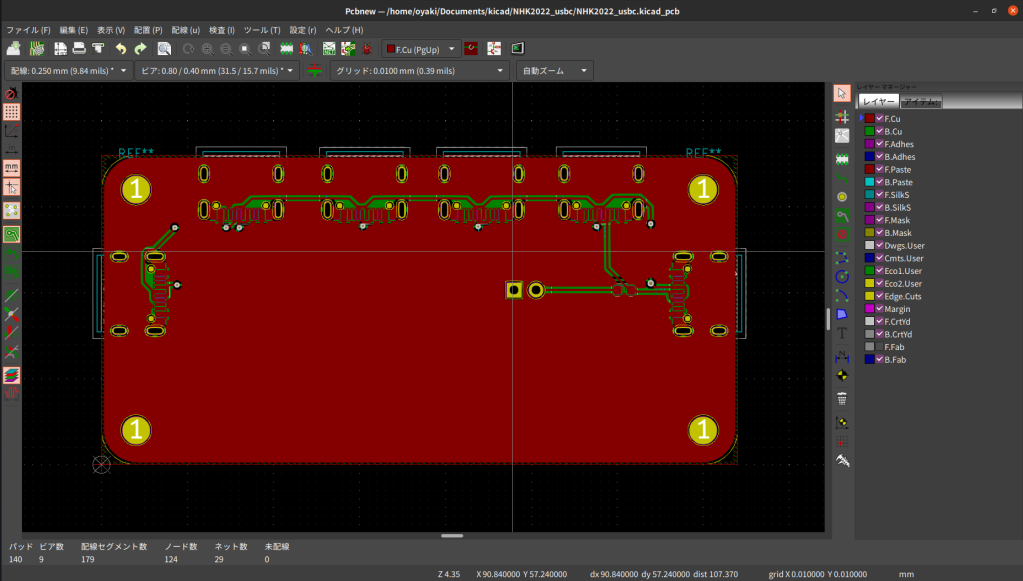
実際の基板。後ろに見えるのがモータードライバ基板で、すべてこのハブに接続されている。
データの受け渡しはUARTやCANを意識せずとも使えるようなプロトコルを独自に開発しました。ソースコードの一部はGitHub上でオープンソースとなっているのでよろしければご覧ください(あまり綺麗なものではありませんが)。
チームIliasは、6/12(日)に大田区総合体育館にて行われたNHK学生ロボコン2022に出場しました。第2試合で長岡技術科学大学に55-10で勝利し、第8試合で豊橋技術科学大学に25-45で敗れ、結果は予選敗退となりました。とても残念ですが、ロボットのポテンシャルは十分に発揮できましたし、チームとしてベストを尽くすこともできました。

Fusion PCBによるサポートについて
- 発注方法の紹介
Fusion PCBでは、簡単な手順で実装サービスを発注することができます。
まず基板を設計して、BOM・ガーバー・配置ファイルを出力します。
出力されたファイルをこちらのサイトにアップロードして、詳細を入力すると発注完了です!

「OPLを自社で持つFusion PCBは基板製造から実装までの流れがとてもスムーズ。納期も早く、高品質な基板を製造していただきました!」
- Fusion PCBサービスに対する感想
今回はSeeed Fusion様に上記のCAN Hubの製造・実装をご支援いただきました。基板のみの発注はこれまで何度も頼んだことがあったのですが、実装サービスを使うのは初めてでうまくできるか心配でした。しかし、そのような心配は杞憂で実際はとても簡単に発注することができました。納期に対する品質も高く、満足のいくクオリティの基板を作っていただきました。大切に活用させていただきます。ありがとうございました。